It makes for a great on-stage demonstration to see a drone managing to keep afloat as its propellers are shut off one after another, simulating an in-flight fault scenario. Such a capability would go a long way in making drones being perceived as intelligent and safe.
A glimpse of how a such a flight might actually look like can seen from this experiment conducted at the University of Delft:
Amazon is working to make this a reality. It is developing drones that can maintain safe flight even in an injured or malfunctioning condition.
Recently, Amazon has obtained a patent which deals with the issue of mid-flight drone propeller failure.
A drone could lose a propeller for a variety of reasons. The propeller blade may break, a motor may malfunction, a controller may go faulty or its electric supply may be disrupted. As a result, the propeller could stop responding.
In such a situation, the first thing a drone needs to do is to sense the fault immediately. This is what the patent describes too.
The drone will sense any onboard faults via its feedback lines. These lines will continuously bring in health signals from each part of the drone and feed them to the on-board flight controller. These signals can be used to detect, for example, the speed at which different propellers are turning.
Feedback lines will originate not just from the motors and propellers but also from a variety of devices such as accelerometers and gyroscopes. These feedback lines will all end up in the central flight controller that will continuously sense whether all components are behaving as expected or not.
As soon as a fault is detected, the drone will assess the severity of the failure. On the basis of that, it will decide whether it is still possible for it to continue flying using the thrust of its propellers.
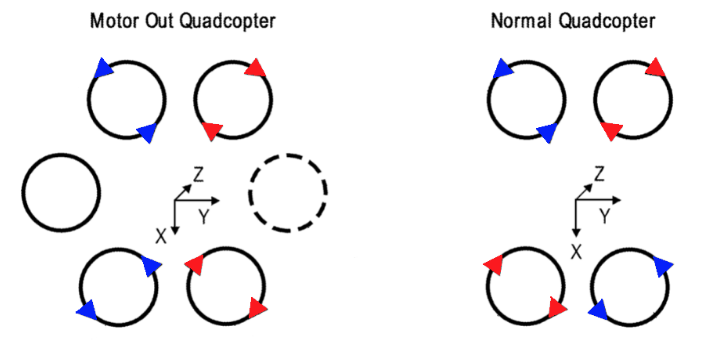
For less severe fault, it would be possible. In case of 6-propeller drones, for example, if one of the propeller fails, the drone will switch to a quadcopter mode. In this mode, The propeller opposite to the failed one will be stopped and the drone will use the remaining four propeller to continue its flight.
Such a quadcopter operation will involve making active changes to the flight strategy, such as reversing the direction two of the four blades as shown in this (edited) drawing from the patent:
On the other hand, it may happen that the fault is too severe to allow for winged flight. In such a situation, the drone will shut off its propellers and use its aerodynamic control surfaces to ‘glide’ over to its nearest safe landing location. A list of safe landing locations along the originally planned route of the drone will be pre-programmed into the drone’s memory.
If all pre-programmed safe locations are far away, the drone might also be able to still find a nearby safe location on its own. The patent says that the drone will use its sensors such as cameras, radars, GPS, etc. to find a nearby landing site away from people and traffic.
We believe that such advancements and demonstrations are crucial to build public and regulatory trust into drones. Let us know what you think in the comments!
Cover image: Photo by Jonathan Lampel on Unsplash


